
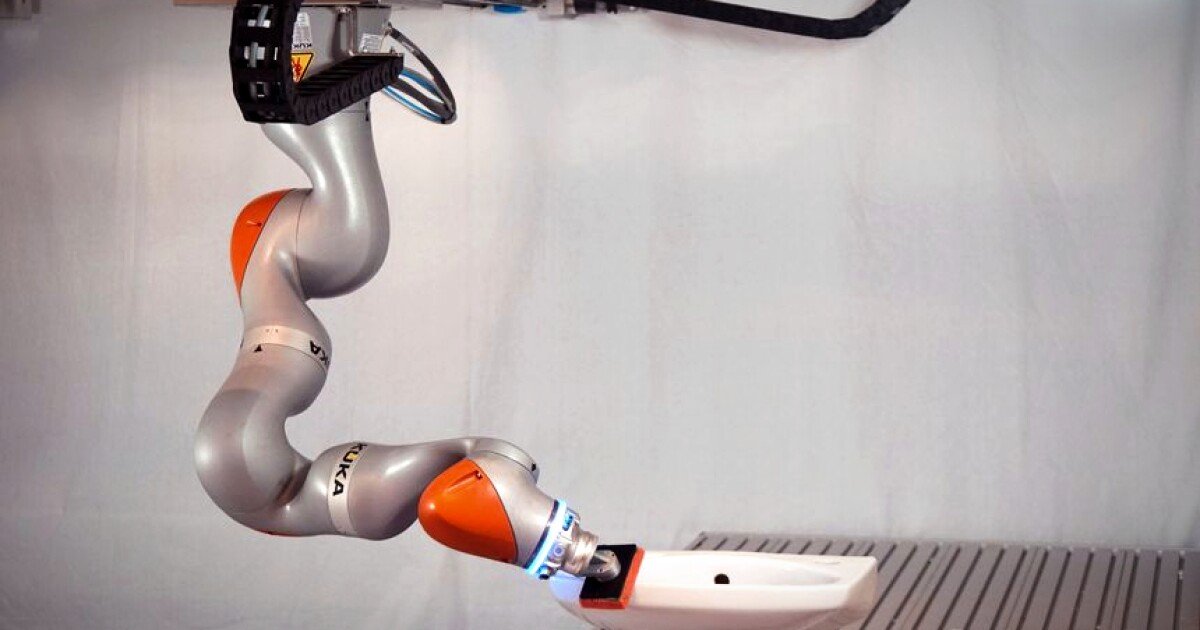
From washing urinals to cleaning the beach, we can already see a future where our robotic servants help keep our world a little cleaner. Now, a robotic arm has mastered the surprisingly complex task of washing a sink, demonstrating its ability to learn.
Cleaning a sink might not sound like the most advanced task, but when you think about it, a lot goes into it. You have to intuitively know at what angle to use the sponge, understand how much force to apply to different parts of the sink depending on the dirt, and constantly adjust your body as you move across the surface. Sure, it’s easy for us humans, but if you’re a programmer working with a bot just starting out, there’s a lot to code.
“Capturing the geometric shape of a sink with cameras is relatively simple,” says Andreas Kugi from the Institute of Automation and Control at TU Wien in Austria. “But that’s not a critical step. It’s much more difficult to teach the robot: What type of movement is required for which part of the surface? How fast should the movement be? What’s the appropriate angle? What’s the right amount of force?” “
Realizing that programming all these data points and combinations is a herculean task, Kugi and his team decided to let their robotic arm learn the task by watching someone else do it.
They therefore developed a special cleaning sponge equipped with force and position sensors and let a person repeatedly clean only the front edge of the sink with it, which was sprayed with a colored gel imitating dirt. They then used the data collected from these exercises to train a neural network that could convert the input into predetermined movement patterns. They filled the robot with these patterns and let them inform its movements as it embarked on a task. As you can see in the following video, the training went quite well.
Roboter lernt Waschbeckenputzen
Federated learning
While the experiment was focused on cleaning a sink, the researchers say it demonstrates the fact that robotic arms could perform a variety of tasks on different, diverse surfaces, including sanding, painting or welding sheet metal. What’s more, they say, a fleet of robots could learn basic movements from each other through what’s known as “federated learning” and then apply those movements to their individual, specified tasks.
“Imagine many workshops using these self-learning robots to sand or paint surfaces,” says Kugi. “Then you could have the bots gain experience individually with local data. Still, all the bots could share the parameters they’ve learned with each other.”
Can you say “singularity?”
A document describing the team’s work is available at TU Wien. It was recently presented at the IROS 2024 conference and won the “Best Application Paper Award”, distinguishing it from over 3,500 other submissions.
Source: TU Wien